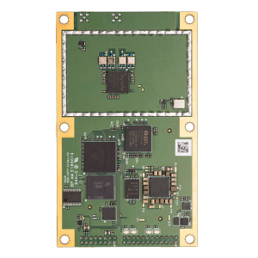
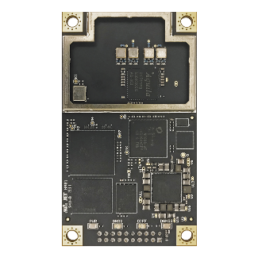
Precision GNSS Module (PGM)
The Precision GNSS Module (PGM) from Carnegie Robotics (formerly Swift Navigation’s) is a precision GNSS receiver created to deliver maximum flexibility of design and performance in a simple to use, industry standard mPCIe format. Suitable for use in a wide range of mobile IoT compute platforms supporting mPCIe cards, it represents a fast and simple way to bring precise positioning to a wide variety of applications.
Description
Overview
Carnegie Robotics’ (formerly Swift Navigation’s) PGM (Precision GNSS Module) is designed to offer fast evaluation and a quick path to production of Carnegie’s precise positioning solution. With its simple to use, industry-standard mPCIe (mini peripheral component interconnect express) format, PGM is ideal for customers building industrial, last mile and Internet of Things (IoT) platforms.
Utilizing the STMicroelectronics TeseoV chipset in a Quectel LG69T-AP module, PGM is designed specifically for Carnegie’s Starling positioning engine running on a host application processor to deliver real-time precision navigation. Highest performance is achieved when used with Carnegie’s Skylark cloud-based corrections service.
Carnegie’s PGM solution supports end-to-end SSR (State Space Representation) format corrections when connected to Carnegie’s wide area corrections service Skylark. SSR format corrections reduce bandwidth usage compared to traditional OSR (Observation Space Representation) while supporting highest performance.
Starling features multi-band, multi-constellation support to provide centimeter-level accuracy and to enable fast convergence time with an overall strong performance. The PGM receiver supports operation on the L1 and L5 bands of GPS, Galileo and BeiDou.
PGM provides dead reckoning capabilities with a leading-edge integrated ASM330 Inertial Measurement Unit (IMU) to provide continual high-precision positioning together with the ability to receive vehicle sensor input such as velocity. The state of the art integrated algorithms in Starling fuse between the IMU data, GNSS measurements, wheel ticks and vehicle dynamics model to provide lane accurate
positioning where GNSS alone would fail.
PGM is easily configurable and supports multiple general-purpose input/output (GPIO) configurability for vehicle interfaces, such as vehicle velocity inputs.
PGM has integrated antenna bias, supporting an active GNSS antenna for best performance. The module supports current sensing and short circuit protection in antenna bias, to enable high reliability vehicle installs and ongoing diagnostics information.
PGM is designed to operate with Carnegie’s positioning engine, Starling, operating on the customers platform. There are a number of benefits from a hosted architecture, ranging from lower overall hardware costs, broader design flexibility, simpler firmware update management and not having constraints applied to performance due to limited compute or interface capabilities in the GNSS module.
PGM is ideally suited as a sensor add-on to embedded computing platforms with mini PCIe expansion slots for applications that require precision position or timing features such as automotive, robotics, high precision data collection, video/sensor position and time-tagging. PGM is designed specifically for Carnegie’s Starling positioning engine on a host application processor to deliver real-time precision navigation with dual-frequency L1/L5 carrier phase differential RTK GNSS and inertial / odometer sensor fusion.
Benefits
- 10 cm Accuracy
- < 20 Seconds Convergence to Sub-Meter Accuracy
- Dead Reckoning Support Delivers High Performance in Urban Areas
- Based on ST Micro’s Leading-Edge TeseoV Measurement Engine in a Quectel Module
Features
- Lane-Level Accurate Positioning
- SSR Format Corrections Support
- Industry Standard mPCIe Format
- Supports GPS, Galileo and Beidou L1/L5
- Integrated IMU
- Digital Wheel Tick / Reverse and CAN Inputs
- Configurable GPIO Interconnect
Technical Specifications
| Dimensions: | 50.95 mm x 30 mm Mini PCIe “Full” |
| Antenna: | U.FL connector for Active L1/L5 GNSS Antenna. Optional user-provided antenna bias. |
| GNSS Constellations and Signals: |
|
| IMU: | Automotive-grade 6 DOF IMU (ST ASM 330) with best-in-class performance |
| Precision Wheel Odometry Input: | Edge-mount connector for wheel tic and reverse indicator vehicle inputs |
| Input/Output: |
|
| Serial Protocols: |
|
| Environmental: | -40°C to +85°C operating range Designed for vehicle vibration |
Ordering
The PGM precision GNSS mPCIe module from Carnegie Robotics (formerly Swift Navigation’s) is available through Canal Geomatics. If you would like more information about this product, please feel free to get in touch with us by completing the Request Pricing form.